深度学习工具与平台 考题汇总(第1-8章)
选择题
1. CPU 和 GPU 的结构特点
- CPU:核心由复杂的控制单元和大容量缓存组成,计算单元(ALU)较少。计算密度较低,但控制逻辑复杂,擅长单线程、控制密集型的复杂逻辑程序,支持分支预测、乱序执行。
- GPU:由上千个简单核心组成,控制单元简单,缓存较小,但拥有海量计算单元(ALU)。计算密度高,高并发,擅长规则、稠密的数据并行计算(如矩阵运算),不支持复杂的分支预测和乱序执行,采用 SIMT(单指令多线程)执行模型。
3. All-Reduce 的两种实现方式
-
Reduce + Broadcast:中心节点先 Reduce 汇总 → 再 Broadcast 分发。缺点:中心带宽瓶颈。
-
Scatter-Reduce + All-Gather(Ring AllReduce):
- 阶段一 Scatter-Reduce(N-1 轮):数据分 N 块,环形传递累加,每节点最终持有某个 chunk 的全局和
- 阶段二 All-Gather(N-1 轮):环形广播,所有节点获得完整全局和
- 优点:无中心瓶颈,单节点通信量 \(O(K)\),带宽负载均衡
4. 将数据转移到 GPU 上的方法(PyTorch)
tensor.cuda():直接将数据转移到默认的 GPU 设备上。tensor.to(device):更灵活,device可指定为'cuda:0'或'cpu'。- 注:
.numpy()是转为 CPU 上的 numpy 数组,.copy()是复制,均不是转移到 GPU 的方法。
7. Docker 包括的主要技术
答案:镜像、容器、仓库。
Docker 属于虚拟化技术而非虚拟机,最重要的区别即没有完整的操作系统。但在非 Linux 内核系统上,往往会使用虚拟机来运行一个 Linux(如 WSL)。
填空题
1. (第1-3章)ASICs 减少访存的核心是?
答案:脉动阵列(Systolic Array)
CPU 和 GPU 通常需要花费大量功耗去读取寄存器的值。TPU 设计的核心是脉动阵列,其思想是将多个 ALU 运算单元串起来,数据在 ALU 之间像水流一样流转传递,从而避免每次计算都要去读取寄存器,极大地减少了访存开销。
1. (第4-6章)传统编译器 Pass 指的是?
答案:对源程序的一次完整扫描与优化处理。
Pass 是编译器对 IR 进行分析或变换的基本单元。LLVM 中由多个 Pass 组成优化管线,每个 Pass 完成特定任务(如死代码消除、常量传播等),多个 Pass 串联构成完整的优化流程。
2. 前端优化中算子融合能够减少 ____ 和 ____
答案:内核启动开销(Kernel Launch Overhead)、内存读取(Memory Access)
融合后多个算子合并为一个算子,一次 kernel 调用即可完成,同时中间结果无需写回主存再读出,减少访存次数,提高计算密度。
3. 被动防御的含义
答案:在不修改模型的情况下找到对抗样本
- 被动防御:在不修改模型的情况下找到对抗样本
- 主动防御:训练一个能够抵抗攻击的模型
4. PyTorch 实现 GPU/节点同步通信原理
- 初始化进程组:
dist.init_process_group(backend='nccl', rank=rank, world_size=world_size) - 通信后端:NCCL(GPU 优化)、Gloo(通用)、MPI(HPC 标准)
- 梯度同步:各节点独立前向/反向 →
dist.all_reduce(gradient)聚合求平均 - 同步机制:AllReduce 本身是同步操作,所有节点到达后才执行
5. HiveD 算法的核心思想
答案:尽可能先从 high-level 分配资源满足租户的需求。
来自 PPT 图注
6. (同第2题)前端优化中算子融合能够减少 ____ 和 ____
答案:内存访问(或访存开销)、Kernel 启动开销
在深度学习框架中,每一次算子执行都会在 GPU 上启动一个 Kernel,并伴随数据从内存读到缓存/寄存器再写回的过程。算子融合可以减少 Kernel 调用次数,同时中间结果保留在寄存器中直接被下一步使用,大幅减少读写全局内存的次数。
7. 模型量化的优点/缺点
优点:
- 减小模型体积:将 FP32 权重压缩为 INT8 甚至三值,存储占用降至原来的 \(1/4\) 甚至更低
- 加速推理:整数运算在 CPU/GPU/NPU 上均快于浮点运算,且数据搬运带宽需求更小
- 降低功耗:整数运算能耗远低于浮点运算,尤其适合边缘设备部署
- 不改变参数数量:矩阵形状不变,无需修改网络结构即可直接替换算子
缺点:
- 精度损失:将连续浮点值映射到离散整数域,存在舍入误差,模型输出质量会下降
- 极端量化困难:INT4 / 二值 / 三值等极端压缩可能带来严重的精度退化
- 需要校准:量化参数(scale、zero point)需要根据实际数据分布确定,不同层敏感度不同
- 训练与推理不一致:量化感知训练(QAT)需在训练时模拟量化噪声,增加训练复杂度
8. 4 worker Gloo 跑 test.py 的 Horovod 启动命令
判断题
1. (第1-3章)动态数据流图可以全局图优化
答案:×(错误)
- 静态图(如 TensorFlow 1.x 的 Define-and-run)是先定义完整的计算图再执行,框架能看到全图信息,可以进行全局图优化(如死代码消除、内存静态分配等)。
- 动态图(如 PyTorch 的 Define-by-run)是边定义边运行,无法提前获知全图结构,因此无法进行全局图化简优化。
1. (第4-6章)前端优化是独立于机器的优化,与硬件无关
答案:√(正确)
前端优化主要作用于计算图级别(DAG),通过图的等价变换化简计算图,降低计算复杂度或内存开销,不涉及具体硬件指令、内存层次或算子实现,因此与硬件平台无关。
2. 结构化剪枝比非结构化剪枝稀疏率更高
答案:×(错误)
恰恰相反,非结构化剪枝的稀疏率更高(可达 80%~90%),而结构化剪枝的稀疏率相对较低(通常停留在 50%~70%)。
原因是:非结构化剪枝按单个权重绝对值大小独立裁剪,颗粒度最细,可以精准打击不重要的权值。结构化剪枝要求以整个通道/滤波器/神经元为单位裁剪,必然会误伤其中数值较大的权重,因此不能剪太多,否则精度急剧下降。
| 非结构化(细粒度) | 结构化(粗粒度) | |
|---|---|---|
| 剪枝粒度 | 单个权重 | 整个通道/滤波器/神经元 |
| 甜区范围 | 80% ~ 90% | 50% ~ 70% |
| 稀疏率 | 更高 | 较低 |
3. 激活稀疏是一种静态的模型稀疏化方法
答案:×(错误)
激活稀疏是动态的。原因如下:
- 激活稀疏由 ReLU 等非线性激活函数 \(\phi(z) = \max(0, z)\) 产生——当输入 \(z < 0\) 时输出严格为 0
- 具体哪些神经元输出为 0 取决于当前输入样本,不同输入会导致完全不同的稀疏模式
- 权重剪枝完成后拓扑固定,是静态的;激活稀疏随样本动态变化,是数据驱动的
| 维度 | 权重稀疏 | 激活稀疏 | 梯度稀疏 |
|---|---|---|---|
| 动态/静态 | 静态:剪枝后拓扑固定 | 动态:随输入样本变化 | 动态:每步迭代位置跳变 |
4. SIMD 是多数据多指令
答案:×(错误)
SIMD 的全称是 Single Instruction, Multiple Data,即单指令流多数据流。一个控制器控制多个处理器,同时对一组数据中的每一个执行相同的操作(单指令),常用于向量、矩阵等数组运算加速(如 AVX/SSE 指令集)。多指令多数据是 MIMD。
5. 同步通信 = 阻塞通信,异步通信 = 非阻塞通信?
答案:×(错误)
两个不同维度:
| 维度 | 同步/异步 | 阻塞/非阻塞 |
|---|---|---|
| 关注点 | 通信双方是否协调时间步 | 函数调用是否立即返回 |
| 同步/阻塞 | 发送方等待接收方确认 | send/recv 不返回,等待完成 |
| 异步/非阻塞 | 双方独立运行 | isend/irecv 立即返回,wait 同步 |
同步 SGD(Barrier + AllReduce)底层可用非阻塞 isend/irecv 实现计算通信重叠。
6. 一个容器包含多层镜像,容器可读可写,镜像只读
答案:√(正确)
容器 Container = 镜像 Image 的多层只读层 + 容器自己的可读写层。准确的说,一个容器包含一个可写的容器层,并共享其底层镜像的多层只读层。
7. 深度学习作业下,被抢占的作业当前只能失败,checkpoint 之后的训练成果将被丢弃
答案:√(正确)
PPT 原话,见 Chapter 7 Slide 35。这里应理解为"最后一次 checkpoint"。
8. (同判断1第4-6章)前端优化是独立于机器的优化,与硬件无关
答案:√(正确)
深度学习框架的编译器分为前端和后端。前端优化针对的是计算图(DAG)本身,如表达式化简、常量折叠、公共子表达式消除等,只改变数学逻辑结构,不涉及具体硬件,因此是硬件无关的。后端优化才涉及针对特定硬件的内存分配、指令调度和 Kernel 生成。
简答题
1. IR 的定义以及作用
定义: IR(Intermediate Representation,中间表示)是编译器中的核心数据结构,用于表示源代码转换过程中的中间形式,连接编译器的前端和后端。在深度学习框架中,数据流图(DAG) 就是一种高层的中间表示。
作用:
| 作用 | 说明 |
|---|---|
| 跨平台支持 | 不同语言前端统一生成 IR,不同硬件后端统一从 IR 生成代码 |
| 解耦前后端 | 新增语言只需写前端,新增硬件只需写后端——M×N 问题变为 M+N 问题 |
| 优化基础 | 在 IR 层面进行与语言、硬件均无关的通用优化 Pass |
| 分层抽象 | AI 编译器中分为 High-level IR(计算图级)和 Low-level IR(算子表达式级) |
AI 编译器中的 IR 层级对比:
| High-level IR | Low-level IR | |
|---|---|---|
| 描述对象 | 算子间的数据依赖关系(图结构) | 单个算子内部的计算逻辑 |
| 粒度 | 图级别 | 算子/循环级别 |
| 典型表达 | Convolution, Matmul, Transformer 等 | load, store, add, mul 等 |
2. 前端优化和后端优化的对象,以及优化方式,各举 4 个例子
(注:在部分试卷中编号为第3题)
前端优化(图级优化,硬件无关):
| 序号 | 优化方式 | 说明 |
|---|---|---|
| 1 | 公共子表达式消除(CSE) | 搜索计算图中相同结构的子图,复用计算结果消除冗余 |
| 2 | 死代码消除(DCE) | 移除对程序输出无影响的节点(如推理时删除训练专用子图) |
| 3 | 常量折叠 | 编译时预先计算常量表达式(如 BN 折叠:将 BN 参数吸收进卷积权重) |
| 4 | 算子融合(Operator Fusion) | 将多个连续算子合并为一个,减少 kernel 启动和内存读写开销 |
其他还包括:算术表达式化简、布局转换(NCHW↔NHWC)、内存分配优化(Inplace Operation / Memory Sharing)等。
后端优化(算子级优化,硬件相关):
| 序号 | 优化方式 | 说明 |
|---|---|---|
| 1 | 循环展开(Loop Unrolling) | 展开循环体减少循环控制开销,暴露指令级并行机会 |
| 2 | 循环分块(Loop Tiling) | 将数据分块适配 Cache 大小,提高数据局部性,减少 Cache Miss |
| 3 | 循环融合(Loop Fusion) | 合并相邻独立循环,减少访存次数,改善缓存局部性 |
| 4 | 循环拆分(Loop Split) | 将大循环分解为多个小循环,便于后续向量化或满足硬件约束 |
其他还包括:内存分配优化(显存池化、In-place)、数据布局转换(NCHW→NHWC)、硬件算子自动调优等。
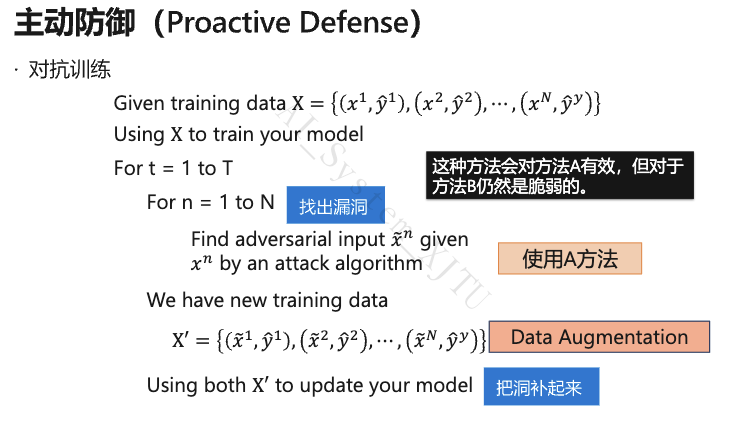
2. (第7-8章)主动防御的过程简述以及缺点
过程:
- 先用原始训练数据 X 训练模型。
- 对每个训练样本 x,用攻击算法生成对应的对抗样本 x̃。
- 把这些对抗样本和原来的标签组成新的训练数据。
- 用原始样本 + 对抗样本一起继续训练模型。
- 重复多轮以提高模型鲁棒性。
缺点:
- 泛化能力不足。对攻击方法 A 有效的对抗样本,对 B 不一定有效。
- 额外计算开销。
4. 算子间并行的主要方式及优缺点
1. 数据并行:
- 做法:各设备存完整模型副本,数据均匀分片,各自前向/反向,梯度 AllReduce 聚合
- 优点:实现简单,负载均衡容易,通信量可控
- 缺点:每设备需存完整模型(大模型放不下);并行度受 batch size 限制
2. 模型并行:
- 做法:计算图拆分到不同设备,跨设备传中间激活
- 优点:可训练单卡放不下的大模型;每设备仅存部分模型
- 缺点:GPU 空闲等待;设备间拷贝激活耗时;负载均衡困难;受层间依赖限制
3. 流水线并行(模型并行的优化):
- 做法:mini-batch 切分为 micro-batch 流水线执行(GPipe/PipeDream)
- 优点:减少 GPU 空闲 Bubble,提高利用率
- 缺点:实现复杂;仍有少量 Bubble;micro-batch 不宜过多
5. 用 pybind11 将 C++ 编写的张量运算扩展为 PyTorch 架构时的 5 步
- 编写 C++ 计算逻辑:实现前向传播(Forward)和反向传播(Backward)的具体 C++ 或 CUDA 代码逻辑。
- 使用 pybind11 绑定接口:使用
PYBIND11_MODULE宏,将写好的 C++ 函数注册并暴露给 Python 解释器。 - 编写
setup.py编译脚本:使用 PyTorch 提供的cpp_extension模块(如CudaExtension)配置编译参数。 - 编译与安装:在终端运行
python setup.py install或build将 C++ 代码编译成 Python 可调用的动态链接库(.so 文件)。 - 在 PyTorch 中封装调用:在 Python 代码中继承
torch.autograd.Function,在forward和backward静态方法中调用刚编译好的 C++ 底层模块,从而融入 PyTorch 的自动求导计算图中。
综合题
1. 按三次拆分一个 63 次循环,并解释循环拆分的作用
循环拆分的作用:
- 将一个循环分解成多个循环,每个子循环的数据集更小,便于放入 Cache,提高缓存局部性
- 拆分后各段独立,便于后续优化 Pass 分别处理
- 可满足特定硬件对循环次数的约束
for (int i = 0; i < 63; i++) {
A[i] = a[i] + b[i];
c[i] = 2 * a[i];
if (temp[i] > data) {
d[i] = a[i];
}
}
// 拆分后
for (int i = 0; i < 63; i++) {
A[i] = a[i] + b[i];
}
for (int i = 0; i < 63; i++) {
c[i] = 2 * a[i];
}
for (int i = 0; i < 63; i++) {
if (temp[i] > data) {
d[i] = a[i];
}
}
2. 计算矩阵相乘时,不分块与分块的内存读取次数
假设计算 \(C = A \times B\),矩阵维度均为 \(N \times N\)。
- 不分块(Naive 朴素实现):计算 \(C\) 中的每一个元素 \(C[i,j]\) 时,需要读取 \(A\) 的一行(\(N\) 个元素)和 \(B\) 的一列(\(N\) 个元素)。\(C\) 共有 \(N^2\) 个元素,总的数据读取次数为 \(O(N^3)\) 级别。由于 Cache 容量有限,\(B\) 的列读取会导致严重的 Cache Miss。
- 分块(Blocked GEMM / Tiling):将矩阵切分为大小为 \(B_s \times B_s\) 的小块(Tile),使得几个数据块可以完全装入高速缓存(CPU 的 L1 Cache 或 GPU 的 Shared Memory/Registers)。读取一个数据块进入缓存后,可以被重复利用执行多次乘加计算。此时内存到缓存的数据搬运次数将从 \(O(N^3)\) 降至大约 \(O(N^3 / B_s)\) 级别,大幅提高了访存计算比(Arithmetic Intensity),突破了内存带宽的瓶颈。
3. Ring AllReduce 画图说明
-
环形拓扑图:N 个 GPU 围成环,每个节点同时向右 Send、从左 Receive
-
Scatter-Reduce 阶段(N-1 轮):
- 数据分为 N 等大 chunk
- 第 k 轮:每个节点发第 (自身块 - k) 块,收邻居发来的块并累加
-
N-1 轮后:每个节点持有一个完整 chunk 的全局和
-
All-Gather 阶段(N-1 轮):
- 每个节点将已规约好的完整块发给邻居,邻居替换/转发
-
N-1 轮后:所有节点拥有全部 chunk 的全局和
-
标注结论:
- 总通信量 = \(2(N-1)K/N\),单节点 \(O(K)\),几乎与 N 无关
- 无中心瓶颈,所有节点带宽负载均衡
4. DRF 资源分配算法,绘制分配过程表格
DRF 算法的详细步骤:
Step 1: 计算用户对每类资源,所使用的资源的占比 Step 2: 对每个用户取最大占比那一项(Dominant Share) Step 3: 找 Dominant Share 最少的用户 Step 4: 优先调度该用户的 task Step 5: 更新资源分配,重复以上步骤
5. Dockerfile 文件中命令的解释,包括 FROM, RUN, WORKDIR, ENV, ENTRYPOINT
- FROM:指定基础镜像
- RUN:在构建镜像时执行命令
- WORKDIR:指定工作目录,后续的命令都会在这个工作目录下进行
- ENV:设置环境变量
- ENTRYPOINT:指定容器启动时默认执行的程序(不易被覆盖)
补充:
- CMD:指定容器启动后的默认命令或默认参数
RUN:构建镜像时执行;CMD:容器启动时的默认命令,可被覆盖;ENTRYPOINT:容器启动时的固定入口,参数可追加,不可被覆盖。