《机器学习》自测参考题
by: 俞逸阳
大部分题目主要依据 2022 年《机器学习》课程期末考试两份回忆版考点与课程 PPT 还原。另外笔者增加了一些并没有出现在回忆版内的题目,目的是尽量覆盖大部分知识点。因此题目数量与正式考试不一致。题目风格也很可能与考试有较大出入。
题目内容用于复习自测,参考答案见卷末附录(部分题目符号习惯可能与PPT中略有不同),选择选项、计算数值、小题考点等为命题人设定,仅供解题思路参考。
一、选择题
1. 关于人工智能与机器学习的发展历史,下列说法错误的是( )
- A. 图灵(Alan Turing)提出了"图灵测试",被誉为"人工智能之父",并非冯·诺依曼
- B. 1956 年的达特茅斯会议被认为是人工智能学科的诞生标志
- C. 机器学习是人工智能的一个子领域,强调从数据中自动学习规律
- D. "人工智能"这一术语最早由图灵在达特茅斯会议上正式提出
2. 某系统输入一张街景照片中的门牌号图像,输出该门牌对应的阿拉伯数字序列(如 "3 4 7")。该任务最准确地属于下列哪一类机器学习基本任务?( )
- A. 转录
- B. 分类
- C. 回归
- D. 输入缺失分类
3. 设二维连续随机变量 \((X, Y)\) 具有概率密度
记 \(Z = \dfrac{X}{Y}\)。下列关于 \(P(X>Y)\)、\(Z\) 的概率密度 \(f_Z(z)\) 以及 \(\mathrm{Cov}(X,Y)\) 的结论中,全部正确的是( )
- A. \(P(X>Y)=\dfrac{2}{3}\);当 \(z\ge 1\) 时 \(f_Z(z)=\dfrac{2}{3z^2}\);\(\mathrm{Cov}(X,Y)=0\)
- B. \(P(X>Y)=\dfrac{1}{2}\);当 \(z\ge 1\) 时 \(f_Z(z)=\dfrac{2}{3}z\);\(\mathrm{Cov}(X,Y)=0\)
- C. \(P(X>Y)=\dfrac{2}{3}\);当 \(z\ge 1\) 时 \(f_Z(z)=\dfrac{2}{3z^2}\);\(\mathrm{Cov}(X,Y)=\dfrac{1}{6}\)
- D. \(P(X>Y)=\dfrac{1}{3}\);当 \(0<z<1\) 时 \(f_Z(z)=\dfrac{2}{3z^2}\);\(\mathrm{Cov}(X,Y)=0\)
4. 关于协方差与相关系数,下列说法正确的是( )
- A. 若 \(\mathrm{Cov}(X, Y) = 0\),则 \(X\) 与 \(Y\) 一定相互独立
- B. 协方差 \(\mathrm{Cov}(X, Y) = \mathbb{E}[XY] - \mathbb{E}[X]\mathbb{E}[Y]\)
- C. 相关系数的取值范围是 \([0, 1]\)
- D. 方差 \(\mathrm{Var}(X)\) 可以取负值
5. 已知真实分布 \(P = (0.5, 0.5)\),预测分布 \(Q = (0.5, 0.5)\),则底数为 2 的情况下交叉熵 \(H(P, Q)\) 等于( )
- A. \(0\)
- B. \(0.5\)
- C. \(1\)
- D. \(2\)
6. 设某离散随机变量有三个取值,其上两个概率分布为 \(P = \left(\tfrac{1}{2}, \tfrac{1}{4}, \tfrac{1}{4}\right)\) 与 \(Q = \left(\tfrac{1}{4}, \tfrac{1}{4}, \tfrac{1}{2}\right)\)。以 \(2\) 为底取对数,则 KL 散度 \(D_{\mathrm{KL}}(P\|Q)\) 等于( )(单位:bit)
- A. \(0\)
- B. \(0.25\)
- C. \(0.5\)
- D. \(0.75\)
7. 在软间隔 SVM 中引入松弛变量 \(\xi_i \ge 0\) 后,原始优化问题的约束条件为( )
- A. \(y_i(\mathbf{w}^\mathsf{T}\mathbf{x}_i + b) \ge 1+\xi_i\)
- B. \(y_i(\mathbf{w}^\mathsf{T}\mathbf{x}_i + b) \ge 1 - \xi_i\)
- C. \(y_i(\mathbf{w}^\mathsf{T}\mathbf{x}_i + b) \le 1 - \xi_i\)
- D. \(|\mathbf{w}^\mathsf{T}\mathbf{x}_i + b - y_i| \le \xi_i\)
8. 前馈神经网络通过 \(\Phi(\mathbf{x})\) 将原始输入变换到新的特征空间。下列不属于课程中介绍的"构造 \(\Phi\) 的三种方式"的是( )
- A. 将\(x\)变换至无限维空间
- B. 手工设计(以人的经验选择特征映射 \(\Phi\))
- C. 通过学习得到 \(\Phi\)(即深度学习的思想,让网络自动学习 \(\Phi\) 的参数)
- D. 令 \(\Phi(\mathbf{x}) = \mathbf{x}\) 即线性恒等映射
9. 下列函数中,不是合法的核函数的是( ) (设 \(\mathbf{x}, \mathbf{z}\) 为同维向量)
- A. \(k(\mathbf{x}, \mathbf{z}) = (\mathbf{x}^\mathsf{T}\mathbf{z} + 1)^2\)
- B. \(k(\mathbf{x}, \mathbf{z}) = \exp\left(-\dfrac{\|\mathbf{x} - \mathbf{z}\|^2}{2\sigma^2}\right)\)
- C. \(k(\mathbf{x}, \mathbf{z}) = k_1(\mathbf{x}, \mathbf{z}) + k_2(\mathbf{x}, \mathbf{z})\),其中 \(k_1\)、\(k_2\) 均为合法核
- D. \(k(\mathbf{x}, \mathbf{z}) = -\exp(\mathbf{x}^\mathsf{T}\mathbf{z})\)
10. 给定如下有向图模型:
graph TD
A --> B
A --> C
B --> D
C --> D下列联合概率分解正确的是( )
- A. \(P(A,B,C,D) = P(A)P(B|A)P(C|A)P(D|B,C)\)
- B. \(P(A,B,C,D) = P(A)P(B)P(C)P(D)\)
- C. \(P(A,B,C,D) = P(A)P(B|A)P(C|B)P(D|C)\)
- D. \(P(A,B,C,D) = P(D)P(B|D)P(C|D)P(A|B,C)\)
11. 某二分类器在测试集上:\(\mathrm{TP}=40\),\(\mathrm{FP}=10\),\(\mathrm{FN}=40\),\(\mathrm{TN}=10\)。下列计算正确的是( )
- A. 准确率 = 0.5
- B. 精确率 \(P = 0.8\)
- C. 召回率 \(R = 0.5\)
- D. 以上 A、B、C 全部正确
12. 关于生成式模型与判别式模型、集成学习,下列说法错误的是( )
- A. 判别式模型直接建模 \(P(y|\mathbf{x})\);生成式模型建模联合分布 \(P(\mathbf{x}, y)\) 或 \(P(\mathbf{x}|y)P(y)\)
- B. Bagging 中各基学习并行训练;Boosting 中各基学习器存在强依赖关系,须串行生成
- C. Boosting 通过每轮调整样本分布、使被错分样本获得更多关注来提升性能
- D. 马尔科夫随机场(MRF)由五个要素决定:位点空间 \(S=\{s_1,\dots,s_n\}\)(表示变量的取值空间,如类别、几何属性)、相空间 \(\Lambda=\{\lambda_1,\dots,\lambda_m\}\)(表示位点的集合,如时间、空间坐标)、邻域系统 \(N=\{N_i\}\)、局部特性 \(\{p^{(i)}\}_{i\in S}\)、概率表达 \(p(\mathbf{x})\)
13. 在最大间隔分类器中,二分类器为 \(y(\mathbf{x})=\mathbf{w}^\mathsf{T}\boldsymbol{\phi}(\mathbf{x})+b\),类别标签 \(t_n\in\{+1,-1\}\)。则样本点 \(\mathbf{x}_n\) 到决策平面 \(y(\mathbf{x})=0\) 的间隔表达式为( )
- A. \(\dfrac{t_n\big(\mathbf{w}^\mathsf{T}\boldsymbol{\phi}(\mathbf{x}_n)+b\big)}{\|\mathbf{w}\|}\)
- B. \(t_n\big(\mathbf{w}^\mathsf{T}\boldsymbol{\phi}(\mathbf{x}_n)+b\big)\)
- C. \(\dfrac{\mathbf{w}^\mathsf{T}\boldsymbol{\phi}(\mathbf{x}_n)+b}{\|\mathbf{w}\|^2}\)
- D. \(\dfrac{\|\mathbf{w}\|}{t_n\big(\mathbf{w}^\mathsf{T}\boldsymbol{\phi}(\mathbf{x}_n)+b\big)}\)
14. 关于 K 均值聚类、密度聚类(DBSCAN)与层次聚类(AGNES),下列说法错误的是( )
- A. K 均值以最小化簇内平方误差 \(E=\sum_{i=1}^{k}\sum_{\mathbf{x}\in C_i}\|\mathbf{x}-\boldsymbol{\mu}_i\|_2^2\) 为目标,需预先指定簇数 \(k\)。
- B. 密度聚类(DBSCAN)基于样本分布的紧密程度、扩展聚类簇,能发现任意形状的簇、可在聚类的同时识别异常点,且无需预先指定簇数
- C. 层次聚类是采用"自底向上"聚合策略的层次聚类算法:初始时每个样本各成一簇,每步合并距离最近的两个簇,直至达到预设簇数
- D. K 均值能直接发现"同心圆""双月牙"等非凸形状的簇,而密度聚类只适用于凸形数据集
15. 某二分类器:\(\mathrm{TP}=30\),\(\mathrm{FP}=30\),\(\mathrm{FN}=0\),\(\mathrm{TN}=40\)。则该分类器的 \(F_2\) 度量为( )
- A. \(\dfrac{5}{6}\)
- B. \(\dfrac{2}{3}\)
- C. \(0.5\)
- D. \(0.75\)
16. 现有如下贷款申请训练集 \(D\):
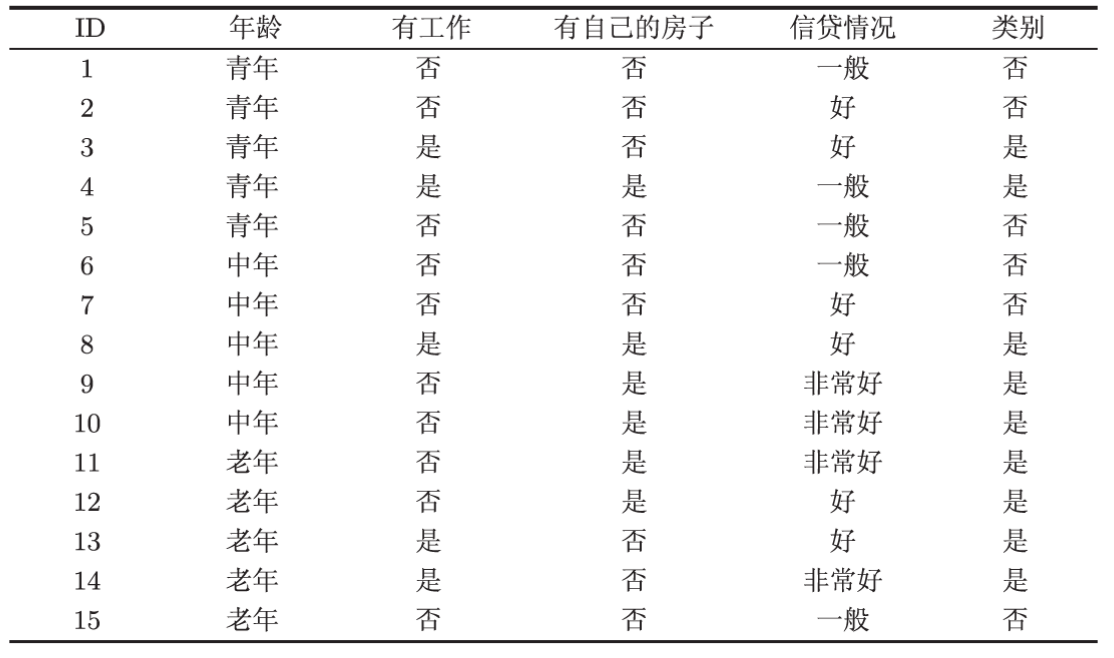
则信息熵 \(\mathrm{Ent}(D)\) 以及按信息增益选出的最优划分属性 \(a^*=\arg\max_a \mathrm{Gain}(D,a)\) 分别为( )
- A. \(\mathrm{Ent}(D)\approx 0.971\) bit,最优属性为"有自己的房子"
- B. \(\mathrm{Ent}(D)\approx 0.971\) bit,最优属性为"有工作"
- C. \(\mathrm{Ent}(D)=1\) bit,最优属性为"有自己的房子"
- D. \(\mathrm{Ent}(D)\approx 0.971\) bit,最优属性为"信贷情况"
17. 关于自编码器(Auto Encoder)、生成对抗网络(GAN)与扩散模型(Diffusion),下列说法错误的是( ) - A. 自编码器由编码器与解码器两部分组成,编码器将高维输入压缩为低维隐变量 \(h\)、解码器据此重建输入 \(\hat{x}\),训练目标是最小化重构误差 \(\mathrm{dist}(x,\hat{x})\) - B. GAN 中生成器 \(G\) 与判别器 \(D\) 进行对抗,目标函数为 \(\min_G\max_D\,\{\mathbb{E}_{x\sim p_{\text{data}}}\log D(x)+\mathbb{E}_{z\sim p_z}\log[1-D(G(z))]\}\),\(D(x)\) 表示判别器输出样本为真的概率 - C. 扩散模型的正向过程逐步向数据添加高斯噪声,使其分布趋于近似标准高斯 \(\mathcal{N}(0,I)\);逆向过程则学习逐步去噪以从噪声重建样本 - D. 在对生成模型的分类中,GAN 属于"显式法",即通过显式建模并直接最大化数据似然 \(p_\theta(x)\) 来训练
二、问答题
1. 模型评估与泛化
- 简述 K 折交叉验证的基本流程,并各列举其一条优点和一条缺点。
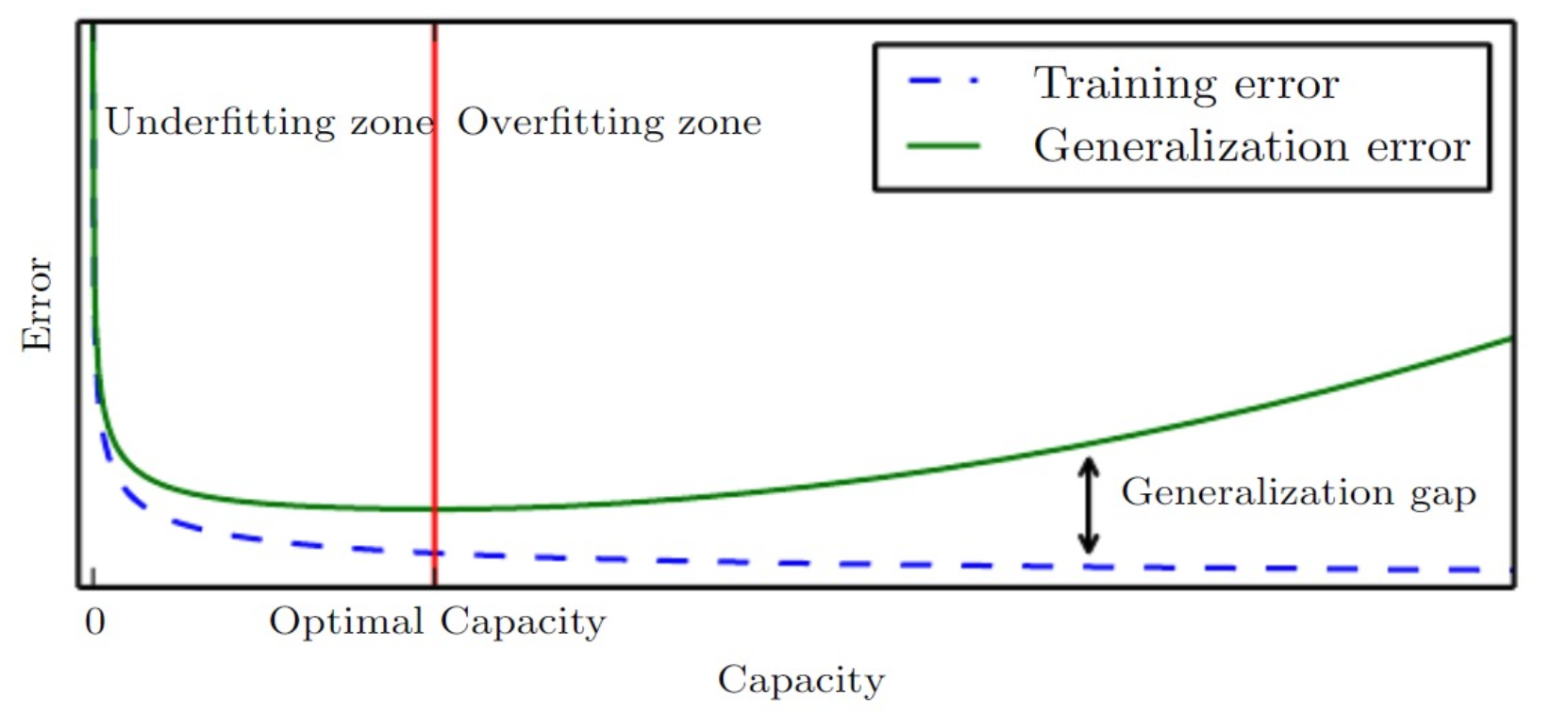
- 给出过拟合与欠拟合的定义;画出训练误差、泛化误差随模型容量变化的曲线,并指出欠拟合区、过拟合区与最优容量位置。
- 什么是正则化?请说明正则化的用途,并写出 L2 正则化的目标函数一般形式。
2. 集成学习
- 什么是集成学习?它主要解决什么问题?简要介绍它的两种主要方法。
- 给定二分类问题 \(y \in \{-1, +1\}\),写出 AdaBoost 算法流程。
3. 线性模型
- 对二分类问题,设判别函数 \(y = \mathbf{w}^\mathsf{T}\mathbf{x} + w_0\)。写出 Fisher 线性判别准则和其中\(S_B\)、\(S_W\) 的定义,并写出优化目标函数 \(J(\mathbf{w})\)以及最优解 \(\mathbf{w}\) 的方向。
- 写出逻辑回归模型 \(P(y=1|\mathbf{x})\)的表达式,并基于最大似然估计写出其似然函数和优化目标函数。
4. 卷积神经网络与循环神经网络
- 画出 LSTM 单元的结构图,标出遗忘门、输入门、输出门、单元状态 \(C_t\) 与隐状态 \(h_t\),并写出各门控与状态更新的计算公式。
- 给定 \(4\times 4\) 单通道输入特征图 \(X\) 与 \(3\times 3\) 卷积核 \(K\)(步长 \(\text{stride}=1\),填充 \(\text{padding}=1\),零填充):
- 求卷积输出特征图的尺寸,及该卷积层的参数量;(注:实际考参数量更可能是给出一个完整的模型网络计算总参数,这时候只要把各层参数相加,要注意不同类型的层中参数计算方法)
- 计算卷积输出特征图;
- 对卷积输出应用 Leaky ReLU(负斜率 $\alpha=0.1$),写出表达式,并计算激活后的特征图;
- 再对激活后的特征图做 $2\times 2$、步长 $2$ 的平均池化,计算输出图。
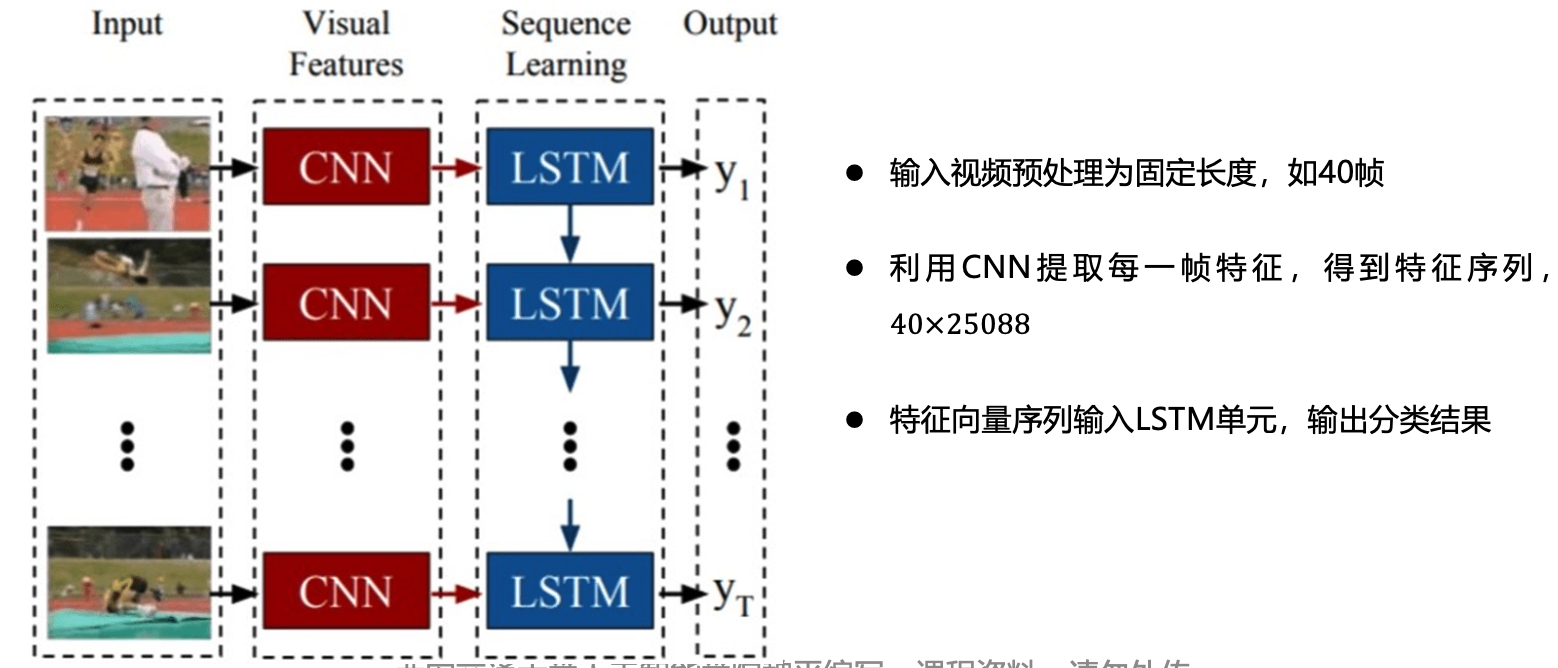
- 现要对一段视频的连续帧进行动作识别。请画出一个结合 CNN + LSTM 的处理流程图,并辅以简要说明。
5. 采样方法
- 简述逆变换采样的方法。
- 设目标分布 \(p(z)=\dfrac{1}{Z_p}\tilde{p}(z)\),其中\(\tilde{p}(z)\) 为已知分布,\(Z_p\) 为归一化因子。简述拒绝采样的步骤。其中 \(k\) 的选取应该符合什么标准?
- (其他也可能考)
6. 概率和概率图模型
- 已知随机变量 \(A\)、\(B\) 的联合分布 \(P(A,B)\) 如下表,求边缘概率 \(P(B{=}1)\)。
| \(P(A,B)\) | \(A=0\) | \(A=1\) |
|---|---|---|
| \(B=0\) | \(0.32\) | \(0.18\) |
| \(B=1\) | \(0.08\) | \(0.42\) |
-
已知五个随机变量的联合分布可分解为 $\(P(a,b,c,e,f)=P(a)\,P(f)\,P(e\mid a,f)\,P(b\mid f)\,P(c\mid e),\)$ 请画出与之对应的有向图(贝叶斯网络)。
-
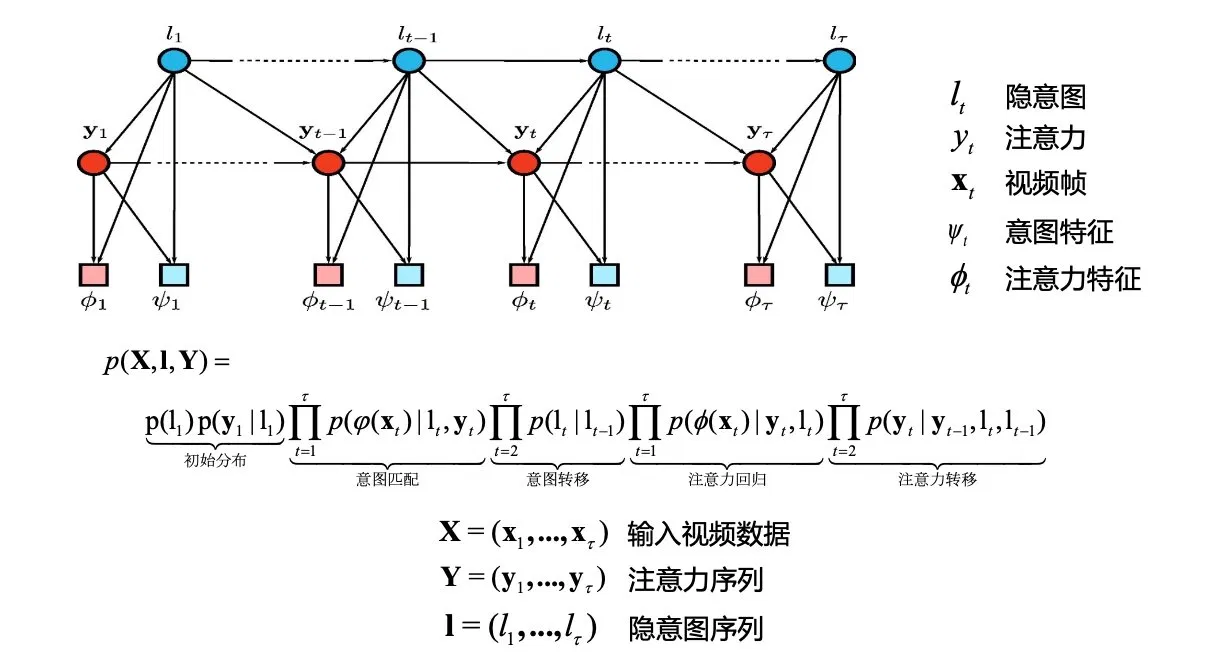
下图是一个用于视频动作识别的注意力图模型
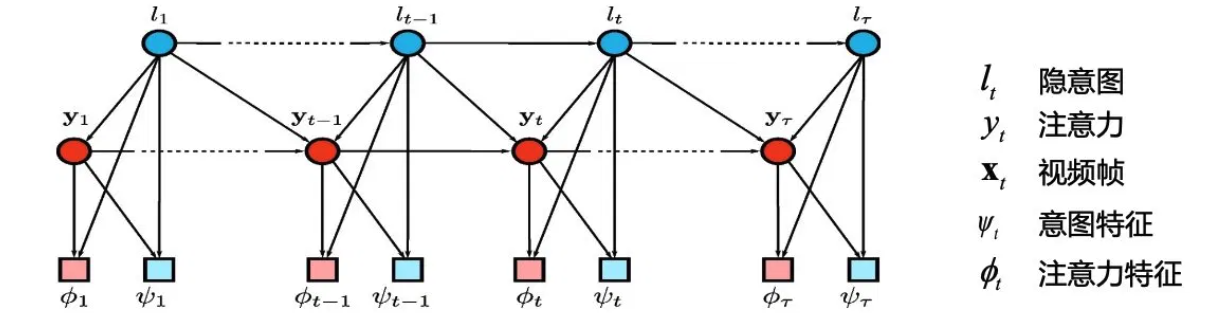
请写出该模型的联合概率分布 \(p(\mathbf{X}, \mathbf{l}, \mathbf{Y})\) 的分解表达式。
7. 考虑一个简单的前馈神经网络:\(2\) 个输入节点 \(x_1,x_2\),\(1\) 个隐藏层节点 \(h\),\(1\) 个输出节点 \(y\)。输入层到隐藏层的权重为 \(w_{1h}=0.5,\ w_{2h}=0.3\);隐藏层到输出层的权重为 \(w_{h1}=0.4\)。激活函数采用 sigmoid 函数 \(\sigma(z)=\dfrac{1}{1+e^{-z}}\)。已知输入样本 \(x_1=0.6,\ x_2=0.8\),期望输出 \(t=0.7\),损失函数取均方误差 \(E=\dfrac{1}{2}(t-y)^2\)。
- 前向传播:计算隐藏层节点的输入 \(z_h\) 与输出 \(h\)、输出层节点的输入 \(z_y\) 与输出 \(y\),以及损失 \(E\)。
- 反向传播:使用反向传播算法计算损失 \(E\) 对隐藏层到输出层权重 \(w_{h1}\) 的偏导数 \(\dfrac{\partial E}{\partial w_{h1}}\)。
8. Transformer 与自注意力机制
- Transformer 编码器的输入编码由哪两部分相加得到?简述为什么需要位置编码。
- Transformer 编码器中为什么引入 \(Q,K,V\) 三个线性变换,而不直接用 \(X\) 计算注意力。
9. 朴素贝叶斯分类器
试由表中的训练数据学习一个朴素贝叶斯分类器并确定 \(x=(2,S)^\mathsf{T}\) 的类标记 \(y\)。表中 \(X^{(1)}\),\(X^{(2)}\) 为特征,取值的集合分别为 \(A_1=\{1,2,3\}\),\(A_2=\{S,M,L\}\),\(Y\) 为类标记,\(Y\in C=\{1,-1\}\)。
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| \(X^{(1)}\) | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 3 |
| \(X^{(2)}\) | \(S\) | \(M\) | \(M\) | \(S\) | \(S\) | \(S\) | \(M\) | \(M\) | \(L\) | \(L\) | \(L\) | \(M\) | \(M\) | \(L\) | \(L\) |
| \(Y\) | \(-1\) | \(-1\) | \(1\) | \(1\) | \(-1\) | \(-1\) | \(-1\) | \(1\) | \(1\) | \(1\) | \(1\) | \(1\) | \(1\) | \(1\) | \(-1\) |
10. 前向算法
考虑盒子和球模型 \(\lambda=(P,Q,\pi)\),状态集合 \(S=\{1,2,3\}\),观测集合 \(V=\{\text{红},\text{白}\}\),
其中 \(P=[p_{ij}]\) 为状态转移矩阵,\(Q=[q_i(\cdot)]\) 为观测(发射)概率矩阵,\(\pi=[\pi_i]\) 为初始状态分布。设 \(n=3\),观测序列 \(\mathbf{y}=(\text{红},\text{白},\text{红})\),试用前向算法计算 \(p(\mathbf{y}\mid\lambda)\)。
三、证明题
1. KL 散度的性质
设 \(P\)、\(Q\) 为定义在同一离散样本空间上的两个概率分布。证明:
- 非负性:\(D_{\mathrm{KL}}(P\|Q) = \sum_x p(x) \log\dfrac{p(x)}{q(x)} \ge 0\)。
- 不对称性:一般情况下 \(D_{\mathrm{KL}}(P\|Q) \ne D_{\mathrm{KL}}(Q\|P)\)。
2. 已知在 ROC 曲线中曲线 I 完全优于曲线 II。证明:在 PR曲线中,曲线 I 同样优于曲线 II。
3. 设 \(\mathbf{x}\)、\(\mathbf{y}\) 为 \(n\) 维变量,\(p(\mathbf{x})\) 为概率密度,\(l\) 为离散型随机变量。证明下列函数是合法核函数:
4. 在隐马尔可夫模型中,观测序列为 \(y_1,y_2,\dots,y_n\),隐状态 \(s_t\in S\)。定义前向变量
即部分观测序列 \(y_1,\dots,y_t\) 与 \(t\) 时刻状态为 \(i\) 的联合概率。假设观测 \(y_t\) 仅依赖当前状态 \(s_t\);状态序列满足一阶马尔可夫性,证明前向变量满足递推关系
并写出 \(p(y_1,y_2,\dots,y_n)\) 的计算式。
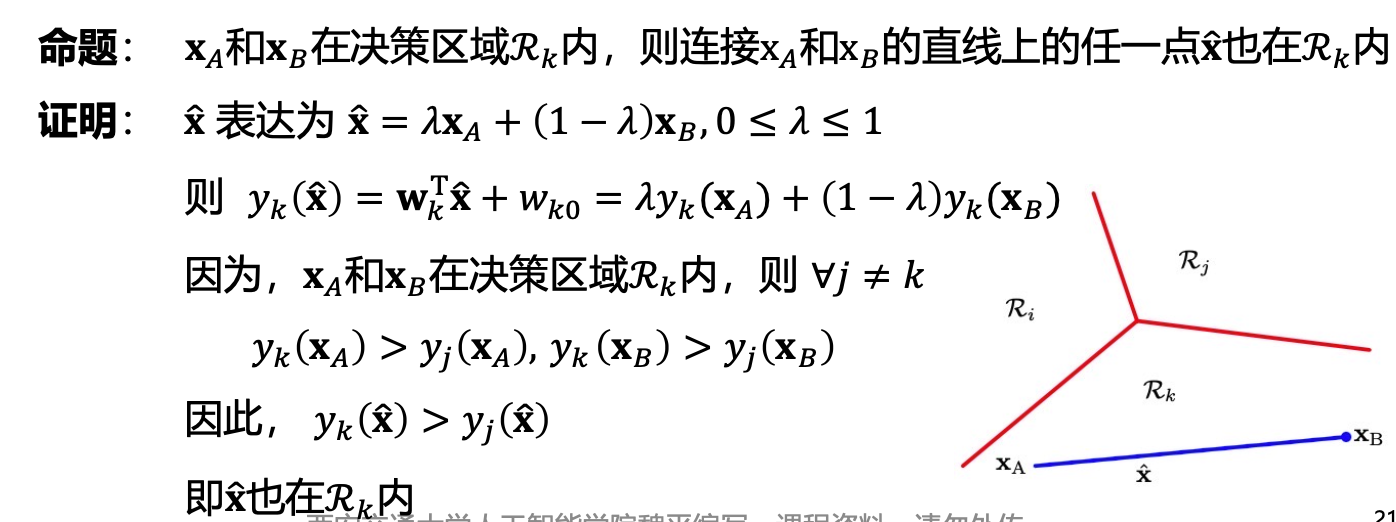
5. 证明 K 类判别式方法的决策区域是单连通和凸的。
6. 考虑线性回归模型,假设目标值与输入满足
其中噪声 \(\epsilon^{(i)}\sim\mathcal{N}(0,\sigma^2)\) 独立同分布, 给定 \(m\) 个独立样本,似然函数 \(L(\boldsymbol{\theta})=p(\vec{y}\mid X;\boldsymbol{\theta})\)。证明:在最大似然估计下,最大化 \(L(\boldsymbol{\theta})\) 等价于最小化最小二乘代价函数
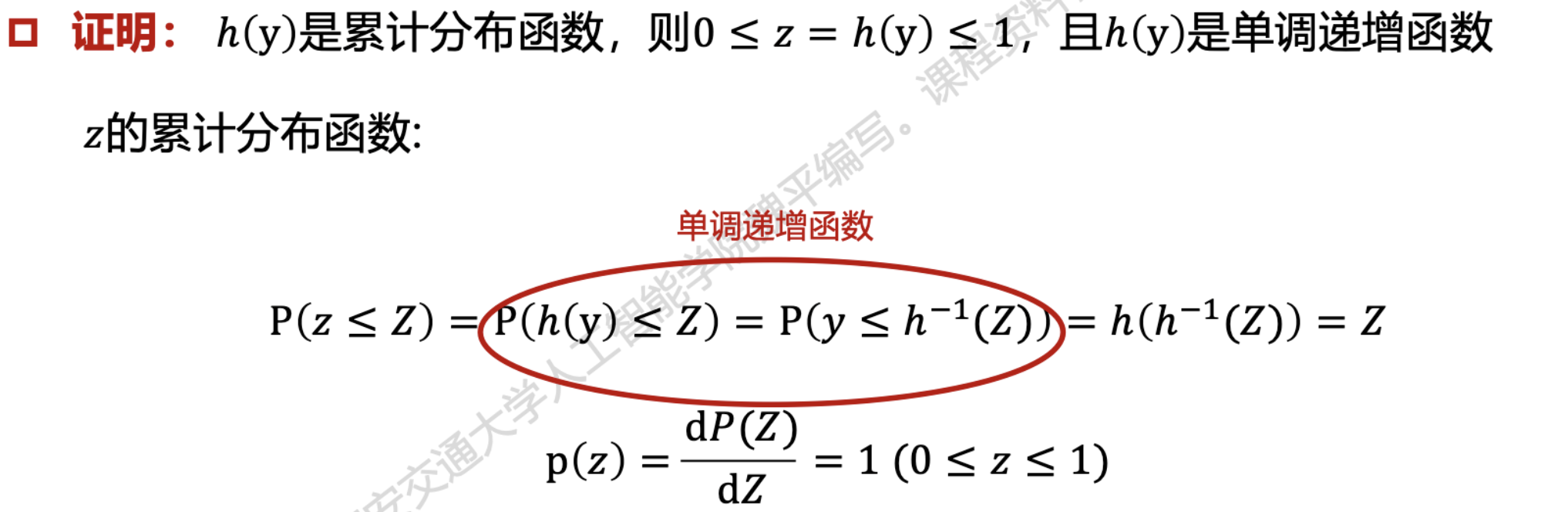
7. 设 \(y\) 是一个连续随机变量,其概率密度函数为 \(p(y)\),累计分布函数为 \(h(y)=P(Y\le y)\),且 \(h\) 是单调递增函数。令 \(z=h(y)\)。证明:\(z\) 服从区间 \([0,1]\) 上的均匀分布。
8. 设扩散模型的正向过程为一阶马尔可夫链,每一步加噪定义为
各步注入的噪声 \(\epsilon_t\sim\mathcal{N}(0,I)\) 相互独立,且与 \(x_0\) 独立。
证明:在给定 \(x_0\) 与 \(0<\beta_s<1\)(\(s\)为任意正整数),且步数足够大时,\(x_t\) 的分布近似为标准高斯分布 \(\mathcal{N}(0,I)\)。
附录:参考答案
一、选择题答案
| 题号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 答案 | D | A | A | B | C | B | B | D | D | A | D | D | A | D | A | A | D |
逐题解析:
- D。"人工智能"术语由 John McCarthy 等在 1956 年达特茅斯会议提出,并非图灵;图灵提出图灵测试且被称为"人工智能之父",A、B、C 正确,错误项为 D。
- A。
- A(提示:概率论并不是这门课的绝对重点,实际应该不会出那么难,但最好还是复习一下概率论相关知识)。
- \(P(X>Y)\):在区域 \(x>y\) 上积分,\(P(X>Y)=\displaystyle\int_0^1 \mathrm{d}x\int_0^x 2x\,\mathrm{d}y=\int_0^1 2x^2\,\mathrm{d}x=\dfrac{2}{3}\)。
- \(Z=X/Y\) 的密度:由商分布公式 \(f_Z(z)=\displaystyle\int_{-\infty}^{+\infty}|y|\,f(yz,\,y)\,\mathrm{d}y=\int_0^1 y\cdot 2(yz)\,\mathrm{d}y\)。当 \(0<z<1\) 时积分上限为 \(1\),\(f_Z(z)=\displaystyle\int_0^1 2y^2z\,\mathrm{d}y=\dfrac{2}{3}z\);当 \(z\ge 1\) 时上限为 \(1/z\),\(f_Z(z)=\displaystyle\int_0^{1/z} 2y^2z\,\mathrm{d}y=\dfrac{2}{3z^2}\);\(z\le 0\) 时为 \(0\)。
- \(\mathrm{Cov}(X,Y)\):边缘密度 \(f_X(x)=\displaystyle\int_0^1 2x\,\mathrm{d}y=2x\),\(f_Y(y)=\displaystyle\int_0^1 2x\,\mathrm{d}x=1\)。因 \(f(x,y)=2x=f_X(x)f_Y(y)\),故 \(X\) 与 \(Y\) 独立,从而 \(\mathrm{Cov}(X,Y)=0\)。
- 三项与选项 A 完全一致,故选 A。
- B。协方差定义即 \(\mathbb{E}[XY]-\mathbb{E}[X]\mathbb{E}[Y]\)。A 错(不相关 \(\ne\) 独立),C 错(相关系数 \(\in [-1,1]\)),D 错(方差非负)。
- C。\(H(P,Q) = -(0.5\cdot\log_2 0.5 + 0.5\cdot\log_2 0.5) = -(0.5\cdot(-1)+0.5\cdot(-1)) = \mathbf{1}\) bit。
- B。\(D_{\mathrm{KL}}(P\|Q)=\sum_x p(x)\log_2\dfrac{p(x)}{q(x)}\),逐项代入: $$ D_{\mathrm{KL}}(P|Q)=\tfrac{1}{2}\log_2\tfrac{1/2}{1/4}+\tfrac{1}{4}\log_2\tfrac{1/4}{1/4}+\tfrac{1}{4}\log_2\tfrac{1/4}{1/2}=\tfrac{1}{2}(1)+\tfrac{1}{4}(0)+\tfrac{1}{4}(-1)=\tfrac{1}{2}-\tfrac{1}{4}=\mathbf{0.25} \text{bit}. $$ 注意 KL 散度不对称,本题若反过来算 \(D_{\mathrm{KL}}(Q\|P)=\tfrac{1}{4}(-1)+0+\tfrac{1}{2}(1)=0.25\) 恰好也为 \(0.25\)(仅因该例数值对称所致,一般情况二者不相等)。
- B。软间隔约束为 \(y_i(\mathbf{w}^\mathsf{T}\mathbf{x}_i+b) \ge 1 - \xi_i\),\(\xi_i \ge 0\)。
- D。构建 \(\phi\) 的三种方式:
- 通用映射 \(\phi\),将 \(x\) 变换至无限维空间 \(\phi(x)\)
- 人工设计 \(\phi\),以人的经验选择特征,如边缘、HOG、SIFT
- 自主学习 \(\phi\),从数据中挖掘和学习实现某一任务目标的最佳 \(\phi(x)\)。深度学习和神经网络即属于此类
- D。核函数要求可以表示为一个内积,\(k(x,y) = \langle \phi(x), \phi(y) \rangle\)。A、B、C 都是合法核函数(多项式核、高斯核、核函数的线性组合仍是核函数),但 D 中如果 \(k\) 是核函数,那么令 \(y = x\) 时必然有 \(k(x,x) = \|\phi(x)\|^2 \ge 0\),但带入 D 中的函数会得到负值,因此不是合法核函数。
- A。按图结构:\(A\) 无父;\(B\) 父为 \(A\);\(C\) 父为 \(A\);\(D\) 父为 \(B\)、\(C\)。故 \(P(A)P(B|A)P(C|A)P(D|B,C)\)。
- D。总样本 \(=40+10+40+10=100\)。\(\mathrm{Accuracy}=\dfrac{\mathrm{TP}+\mathrm{TN}}{\text{总数}}=\dfrac{40+10}{100}=\mathbf{0.5}\);\(P=\dfrac{\mathrm{TP}}{\mathrm{TP}+\mathrm{FP}}=\dfrac{40}{40+10}=\mathbf{0.8}\);\(R=\dfrac{\mathrm{TP}}{\mathrm{TP}+\mathrm{FN}}=\dfrac{40}{40+40}=\mathbf{0.5}\)。三项均正确,故选 D。
- D。马尔可夫随机场确由五个要素决定(位点空间 \(S\)、相空间 \(\Lambda\)、邻域系统 \(N\)、局部特性 \(\{p^{(i)}\}_{i\in S}\)、概率表达 \(p(\mathbf{x})\)),但 D 把位点空间与相空间的定义对调了:正确表述应为——位点空间 \(S\) 是位点的集合(如时间、空间坐标),相空间 \(\Lambda\) 是变量的取值空间(如类别、几何属性)。故 D 错误,应选 D。
- A。点到超平面 \(y(\mathbf{x})=\mathbf{w}^\mathsf{T}\boldsymbol{\phi}(\mathbf{x})+b=0\) 的距离为 \(\dfrac{|y(\mathbf{x}_n)|}{\|\mathbf{w}\|}\);对所有样本有 \(t_n y(\mathbf{x}_n)>0\),所以间隔 \(=\dfrac{t_n(\mathbf{w}^\mathsf{T}\boldsymbol{\phi}(\mathbf{x}_n)+b)}{\|\mathbf{w}\|}\),选 A。
- D。D 密度聚类能处理"同心圆""双月牙"等非凸形状,而 K 均值在这类数据上失效(只适合凸/球形簇),故 D 错误,应选 D。
- A。先算查准率与查全率:\(P=\dfrac{\mathrm{TP}}{\mathrm{TP}+\mathrm{FP}}=\dfrac{30}{60}=0.5\),\(R=\dfrac{\mathrm{TP}}{\mathrm{TP}+\mathrm{FN}}=\dfrac{30}{30}=1\)。代入 \(\beta=2\):\(F_2=(1+4)\cdot\dfrac{P\cdot R}{4P+R}=5\cdot\dfrac{0.5\times 1}{4\times 0.5+1}=\dfrac{5}{6}\),选 A。
- A。
- 信息熵:\(D\) 中"是" \(9\) 个、"否" \(6\) 个,故 $$ \mathrm{Ent}(D)=-\left(\tfrac{9}{15}\log_2\tfrac{9}{15}+\tfrac{6}{15}\log_2\tfrac{6}{15}\right)\approx 0.971 \text{bit}. $$
- 有自己的房子(记 \(A_3\)):有房 \(\{4,8,9,10,11,12\}\) 共 \(6\) 个全为"是"(\(\mathrm{Ent}=0\));无房 \(9\) 个为 \(3\) 是 \(6\) 否(\(\mathrm{Ent}=-\tfrac{1}{3}\log_2\tfrac{1}{3}-\tfrac{2}{3}\log_2\tfrac{2}{3}\approx 0.918\))。 $$ \mathrm{Gain}(D,A_3)=0.971-\left(\tfrac{6}{15}\times 0+\tfrac{9}{15}\times 0.918\right)\approx 0.420. $$
- 有工作(\(A_2\)):\(\mathrm{Gain}(D,A_2)=0.971-\left(\tfrac{5}{15}\times 0+\tfrac{10}{15}\times 0.971\right)\approx 0.324\)。
- 信贷情况(\(A_4\)):\(\mathrm{Gain}(D,A_4)\approx 0.363\)。
- 年龄(\(A_1\)):青年 \(\{1\text{–}5\}\) 为 \(2\) 是 \(3\) 否、中年 \(\{6\text{–}10\}\) 为 \(3\) 是 \(2\) 否,二者熵均为 \(-\tfrac{2}{5}\log_2\tfrac{2}{5}-\tfrac{3}{5}\log_2\tfrac{3}{5}\approx 0.971\);老年 \(\{11\text{–}15\}\) 为 \(4\) 是 \(1\) 否,熵为 \(-\tfrac{4}{5}\log_2\tfrac{4}{5}-\tfrac{1}{5}\log_2\tfrac{1}{5}\approx 0.722\)。 $$ \mathrm{Gain}(D,A_1)=0.971-\left(\tfrac{5}{15}\times 0.971+\tfrac{5}{15}\times 0.971+\tfrac{5}{15}\times 0.722\right)\approx 0.971-0.888\approx 0.083. $$
- 四者中 \(\mathrm{Gain}(D,A_3)\approx 0.420\) 最大,故最优划分属性为"有自己的房子",选 A。
- D。按课程对生成模型的分类:显式法(近似法→变分自编码器、扩散模型;变形法→流模型)与隐式法(→生成对抗网络)。GAN 不显式建模似然 \(p_\theta(x)\),而是通过生成器/判别器对抗博弈隐式地拟合数据分布,属于隐式法,故 D 错误。
二、问答题参考答案
1. 模型评估与泛化
- K 折交叉验证:将数据集均分为 \(k\) 份,每次取 1 份作验证集、其余 \(k-1\) 份作训练集,重复 \(k\) 次,取 \(k\) 次验证指标的平均作为模型评估结果。
- 优点:充分利用数据、评估结果更稳定(方差小),适合数据量有限场景。
- 缺点:需训练 \(k\) 次,计算开销大;\(k\) 选取不当会影响偏差/方差权衡。
- 过拟合:过拟合指模型过于复杂,不仅学习了数据的真实规律,还“记住”了训练数据中的噪声和异常值,导致在训练集上表现极佳,但在测试集或新数据上性能下降,训练误差低但泛化误差高。 欠拟合:模型过于简单,无法捕捉数据中的基本规律,导致在训练集和测试集上表现都不佳,训练误差和泛化误差都较高。
图:
- 正则化:为了防止过拟合,可以为损失函数加上一个惩罚项,对复杂的模型进行惩罚,强制让模型的参数值尽可能小以使得模型更简单,以提高泛化性能,这种方法称为正则化技术。
L2 正则化目标:\(J(\mathbf{w}) = L(\mathbf{w}) + \dfrac{\lambda}{2}\|\mathbf{w}\|_2^2\)(\(\lambda\) 为正则化系数,控制惩罚强度)。L1 正则化(\(\lambda\|\mathbf{w}\|_1\))则产生稀疏解。(各种符号习惯只要正确均可)
2. 集成学习
-
集成学习:训练多个学习器并按某种策略组合,以获得比单个学习器更好、更稳健的性能;主要解决单模型偏差/方差大、易过拟合或欠拟合的问题。 Bagging通过自助采样得到不同子集,并行训练相互独立的基学习器并结合,主要降低方差;Boosting串行训练,每轮根据上一轮结果调整样本权重,使错分样本被更关注,主要降低偏差。
-
AdaBoost 算法(二分类 \(y \in \{-1,+1\}\),共 \(T\) 轮):
- 初始化样本权值分布:\(D_1(i) = \dfrac{1}{m},\ i = 1,\dots,m\)。
- 对 \(t = 1,\dots,T\):
- 基于分布 \(D_t\) 训练基分类器 \(h_t(\mathbf{x})\)。
- 计算误差率:\(e_t = \sum_{i} D_t(i)\cdot \mathbb{1}[h_t(\mathbf{x}_i) \ne y_i]\);若 \(e_t > 0.5\) 则停止。
- 计算系数:\(\alpha_t = \dfrac{1}{2}\ln\dfrac{1 - e_t}{e_t}\)。
- 更新权值: $\(D_{t+1}(i) = \frac{D_t(i)}{Z_t}\exp\!\big(-\alpha_t\, y_i\, h_t(\mathbf{x}_i)\big),\)$ 其中规范化因子 \(Z_t = \sum_{i} D_t(i)\exp\!\big(-\alpha_t\, y_i\, h_t(\mathbf{x}_i)\big)\),保证 \(D_{t+1}\) 为分布。 (错分样本权值放大、正确分类样本权值缩小。)
- 输出强分类器:\(H(\mathbf{x}) = \mathrm{sign}\!\left(\sum_{t} \alpha_t\, h_t(\mathbf{x})\right)\)。
3. 线性模型
-
Fisher 线性判别:
-
Fisher准则:
\[ \begin{aligned} J(\mathbf{w}) &= \frac{(m_2 - m_1)^2}{s_1^2 + s_2^2} = \frac{\mathbf{w}^T S_B \mathbf{w}}{\mathbf{w}^T S_W \mathbf{w}} \\ S_B &= (\mathbf{m}_2 - \mathbf{m}_1)(\mathbf{m}_2 - \mathbf{m}_1)^T \\ S_W &= \sum_{n \in C_1} (\mathbf{x}_n - \mathbf{m}_1)(\mathbf{x}_n - \mathbf{m}_1)^T + \sum_{n \in C_2} (\mathbf{x}_n - \mathbf{m}_2)(\mathbf{x}_n - \mathbf{m}_2)^T \end{aligned} \] -
优化目标:\(w^* = \arg\max J(\mathbf{w})\)。
- 最优解方向:\(\mathbf{w} \propto S_W^{-1}(\boldsymbol{\mu}_1 - \boldsymbol{\mu}_2)\)。
-
-
逻辑回归:\(P(y=1|\mathbf{x}) = \sigma(\mathbf{w}^\mathsf{T}\mathbf{x} + w_0) = \dfrac{1}{1 + \exp\!\big(-(\mathbf{w}^\mathsf{T}\mathbf{x} + w_0)\big)}\)。 似然 \(L(\mathbf{w}) = \prod_{i} \sigma(z_i)^{y_i}\,\big(1-\sigma(z_i)\big)^{1-y_i}\),其中 \(z_i = \mathbf{w}^\mathsf{T}\mathbf{x}_i + w_0\)。
取负对数似然得目标,最小化交叉熵损失:
$$ J(\mathbf{w}) = -\sum_{i} \big[\, y_i \log \sigma(z_i) + (1 - y_i)\log\big(1 - \sigma(z_i)\big) \big]. $$
用梯度下降/牛顿法求解,梯度为 \(\nabla J(\mathbf{w}) = \sum_{i} \big(\sigma(z_i) - y_i\big)\mathbf{x}_i\)。
4. 卷积神经网络与循环神经网络
-
LSTM 单元结构图:
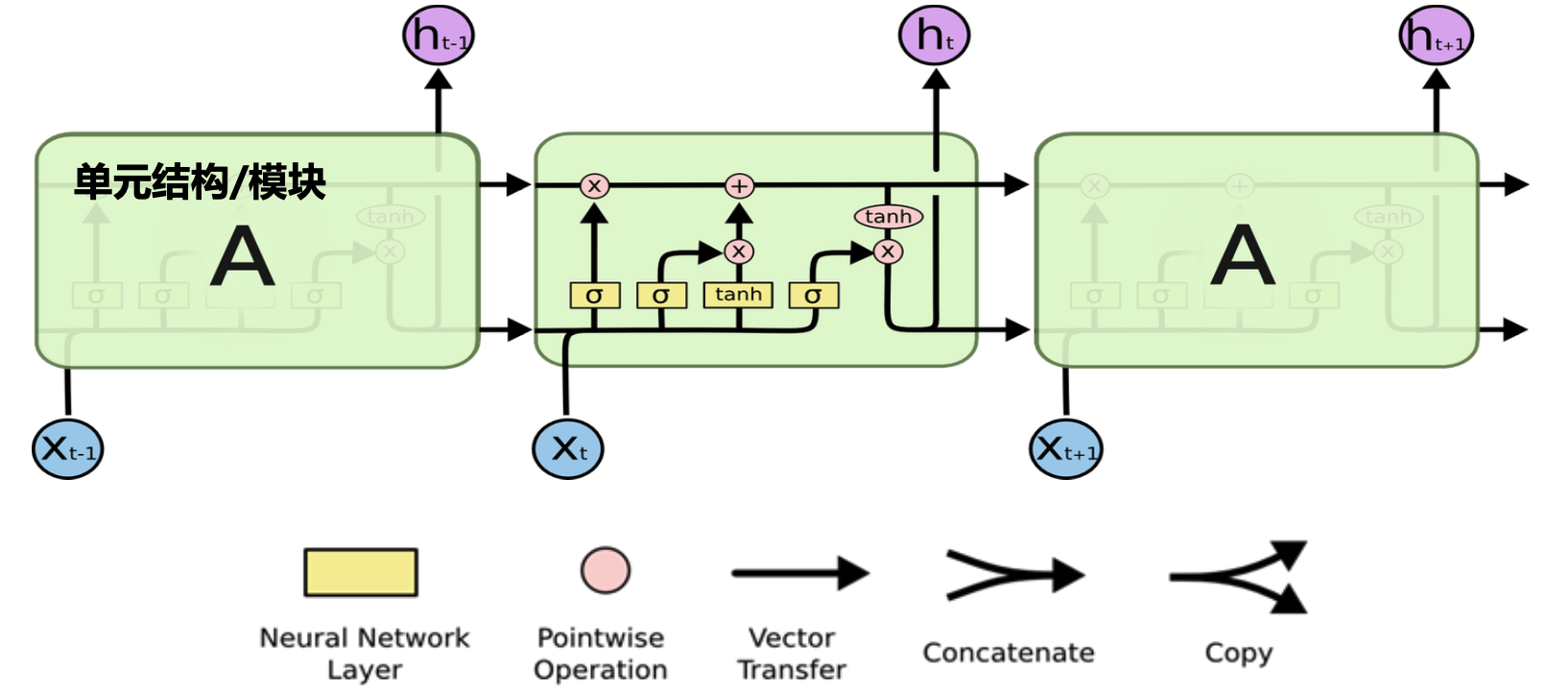
计算公式:
\[ \begin{aligned} f_t &= \sigma\big(W_f[h_{t-1}, x_t] + b_f\big),\quad i_t = \sigma\big(W_i[h_{t-1}, x_t] + b_i\big),\quad o_t = \sigma\big(W_o[h_{t-1}, x_t] + b_o\big), \\ \tilde{C}_t &= \tanh\big(W_C[h_{t-1}, x_t] + b_C\big),\quad C_t = f_t \odot C_{t-1} + i_t \odot \tilde{C}_t,\quad h_t = o_t \odot \tanh(C_t). \end{aligned} \] -
卷积计算:
- 输出尺寸 \(= \dfrac{4 - 3 + 2\times 1}{1} + 1 = \mathbf{4}\),即 \(4\times 4\);参数量(无偏置) \(= 3\times 3 = \mathbf{9}\)。
- 卷积输出:逐格计算得: \(\begin{bmatrix} 20 & 0 & 40 & 60 \\ 0 & -40 & 20 & 60 \\ 40 & 20 & 60 & 80 \\ 60 & 60 & 80 & 60 \end{bmatrix}\)
- Leaky ReLU:\(f(z) = \begin{cases} z, & z \ge 0 \\ 0.1\,z, & z < 0 \end{cases}\),即 \(f(z) = \max(0.1z,\, z)\)。仅 \(-40\times 0.1=-4\),激活后: \(\begin{bmatrix} 20 & 0 & 40 & 60 \\ 0 & -4 & 20 & 60 \\ 40 & 20 & 60 & 80 \\ 60 & 60 & 80 & 60 \end{bmatrix}\)
- 平均池化(\(2\times 2\)、\(\text{stride}=2\)):输出尺寸 \(=\left\lfloor\dfrac{4-2}{2}\right\rfloor+1=\mathbf{2}\),即 \(2\times 2\)。逐窗取平均:
- 左上:\(\dfrac{20+0+0+(-4)}{4}=\dfrac{16}{4}=4\);
- 右上:\(\dfrac{40+60+20+60}{4}=\dfrac{180}{4}=45\);
- 左下:\(\dfrac{40+20+60+60}{4}=\dfrac{180}{4}=45\);
- 右下:\(\dfrac{60+80+80+60}{4}=\dfrac{280}{4}=70\)。 故池化输出为 \(\begin{bmatrix} 4 & 45 \\ 45 & 70 \end{bmatrix}\),尺寸 \(2\times 2\)。
-
CNN + LSTM 动作识别流程:
5. 采样方法
- 逆变换采样:采均匀分布中的随机数 \(u \sim U(0,1)\) \(\to\) 输出 \(x = F^{-1}(u)\)。
-
拒绝采样:用一个更简单、易采样的提议分布 \(q(z)\)覆盖目标分布。引入常数 \(k\),使 \(kq(z)\) 对任意 \(z\) 满足 \(kq(z)\ge \tilde{p}(z)\)。步骤:
- ① 从 \(q(z)\) 采样生成一个样本 \(z_0\);
- ② 在区间 \([0,\,kq(z_0)]\) 上均匀采样一个 \(u_0\);
- ③ 若 \(u_0 > \tilde{p}(z_0)\) 则拒绝该样本,否则接受 \(z_0\);
- ④ 重复以上过程,得到的 \([z_0, z_1, \dots, z_n]\) 即为对 \(p(z)\) 的一个近似。
\(k\) 应尽可能小、使 \(kq(z)\) 恰好覆盖 \(\tilde{p}(z)\),以降低拒绝概率、提高采样效率。
6. 概率图模型
- 边缘概率由联合分布对 \(A\) 求和(边缘化):\(P(B{=}1) = P(A{=}0,B{=}1) + P(A{=}1,B{=}1) = 0.08 + 0.42 = \mathbf{0.50}\)。
- 由分解式 \(P(a,b,c,e,f)=P(a)P(f)P(e|a,f)P(b|f)P(c|e)\) 读出各节点的父节点:\(a\)、\(f\) 无父节点;\(e\) 的父为 \(a,f\);\(b\) 的父为 \(f\);\(c\) 的父为 \(e\)。故有向图的边为 \(a\to e\)、\(f\to e\)、\(f\to b\)、\(e\to c\):
graph LR
a["a"] --> e["e"]
f["f"] --> e
f --> b["b"]
e --> c["c"]- 联合概率计算
7. 前馈神经网络与反向传播计算
-
前向传播:
- 隐藏层输入:\(z_h=w_{1h}x_1+w_{2h}x_2=0.5\times 0.6+0.3\times 0.8=0.30+0.24=\mathbf{0.54}\);
- 隐藏层输出:\(h=\sigma(0.54)=\dfrac{1}{1+e^{-0.54}}\approx\mathbf{0.632}\);
- 输出层输入:\(z_y=w_{h1}\,h=0.4\times 0.632\approx\mathbf{0.253}\);
- 输出层输出:\(y=\sigma(0.253)=\dfrac{1}{1+e^{-0.253}}\approx\mathbf{0.563}\);
- 损失:\(E=\dfrac{1}{2}(t-y)^2=\dfrac{1}{2}(0.7-0.563)^2=\dfrac{1}{2}(0.137)^2\approx\mathbf{0.0094}\)。
-
反向传播:由链式法则 \(\dfrac{\partial E}{\partial w_{h1}}=\dfrac{\partial E}{\partial y}\cdot\dfrac{\partial y}{\partial z_y}\cdot\dfrac{\partial z_y}{\partial w_{h1}}\),其中
- \(\dfrac{\partial E}{\partial y}=-(t-y)=-(0.7-0.563)=-0.137\);
- \(\dfrac{\partial y}{\partial z_y}=\sigma'(z_y)=y(1-y)=0.563\times(1-0.563)\approx0.246\)(sigmoid 导数 \(\sigma'=\sigma(1-\sigma)\));
- \(\dfrac{\partial z_y}{\partial w_{h1}}=h\approx0.632\)。
故 \(\dfrac{\partial E}{\partial w_{h1}}=-(t-y)\,y(1-y)\,h\approx-0.137\times0.246\times0.632\approx\mathbf{-0.0213}\)。
8. Transformer 与自注意力机制
-
输入编码 \(=\) 词元嵌入向量 \(+\) 位置编码。 需要位置编码的原因:自注意力的计算与输入顺序是无关的,但相同的词以不同顺序排列可能表达不同语义。因此须为输入特征注入序列位置信息,以区分不同顺序的句子。
-
\(W^Q,W^K,W^V\) 是可学习参数,引入它们可增强模型的表征与拟合能力,并对原始输入 \(X\) 起到加工、缓冲的作用、使模型更鲁棒;若直接用 \(X\)(即 \(Z=\mathrm{softmax}(XX^\mathsf{T}/\sqrt{d})X\)),相似度矩阵 \(XX^\mathsf{T}\) 是对称的、且查询与键被强制相同,表达能力受限。
9. 朴素贝叶斯分类器
容易计算下列概率:
对于给定的 \(x=(2,S)^\mathsf{T}\) 计算:
因为 \(P(Y=-1)P(X^{(1)}=2|Y=-1)P(X^{(2)}=S|Y=-1)\) 最大,所以 \(y=-1\)。\(\blacksquare\)
10. 前向算法 按照前向算法:
(1)计算初值(初始化)
(2)递推计算
(3)终止
\(\blacksquare\)
三、证明题参考解答
1. KL 散度的性质
(1) 非负性:
利用 \(\ln t \le t - 1\)(\(t > 0\),等号当 \(t = 1\)):
故 \(-D_{\mathrm{KL}}(P\|Q) \le 0\),即 \(\mathbf{D_{\mathrm{KL}}(P\|Q) \ge 0}\)。等号成立 \(\Leftrightarrow\) 对所有 \(x\) 有 \(\dfrac{q(x)}{p(x)} = 1\),即 \(\mathbf{P = Q}\)。
(2) 不对称性(反例): 取 \(P = (0.5, 0.5)\),\(Q = (0.9, 0.1)\)。
两者不相等,故 KL 散度不对称。\(\blacksquare\)
2.
固定正样本数 \(n_p\)、负样本数 \(n_n\)。
- \(\mathrm{TPR} = \dfrac{\mathrm{TP}}{n_p}\);\(\mathrm{FPR} = \dfrac{\mathrm{FP}}{n_n}\);\(\mathrm{P} = \dfrac{\mathrm{TP}}{\mathrm{TP} + \mathrm{FP}}\)。
曲线 I 在 ROC 上完全优于 II:即对任意给定 \(\mathrm{TPR}\),曲线 I 的 FPR 不大于曲线 II 的 FPR,那么 \(\mathrm{FP}_{\mathrm{I}} \le \mathrm{FP}_{\mathrm{II}}\)。
即在任意相同的 \(\mathrm{TPR}\) 处,曲线 I 的 \(\mathrm{P}\) 都不小于曲线 II。 故在 PR 空间中曲线 I 同样支配(优于)曲线 II。\(\blacksquare\)
3. 核函数验证
记 \(k(\mathbf{x}, \mathbf{y}) = k_1(\mathbf{x}, \mathbf{y})\cdot k_2(\mathbf{x}, \mathbf{y})\),其中
- \(k_1(\mathbf{x}, \mathbf{y}) = \exp\!\left(-\dfrac{(\mathbf{x}-\mathbf{y})^\mathsf{T}(\mathbf{x}-\mathbf{y})}{2}\right) = \exp\!\left(-\dfrac{\|\mathbf{x}-\mathbf{y}\|^2}{2}\right)\),为高斯核,是合法核函数。
- \(k_2(\mathbf{x}, \mathbf{y}) = \displaystyle\sum_l p(\mathbf{x}|l)\, p(\mathbf{y}|l)\, p(l)\)。定义特征映射 \(\boldsymbol{\varphi}(\mathbf{x}) = \big(\sqrt{p(l)}\,p(\mathbf{x}|l)\big)_l\)(以离散 \(l\) 为索引的向量),则 $\(k_2(\mathbf{x}, \mathbf{y}) = \sum_l \big[\sqrt{p(l)}\,p(\mathbf{x}|l)\big]\cdot\big[\sqrt{p(l)}\,p(\mathbf{y}|l)\big] = \langle \boldsymbol{\varphi}(\mathbf{x}), \boldsymbol{\varphi}(\mathbf{y}) \rangle,\)$ 是一个内积,故 \(k_2\) 为合法核函数。
由核函数的性质——两个核函数的乘积仍是核函数,所以 \(k(\mathbf{x}, \mathbf{y}) = k_1(\mathbf{x}, \mathbf{y})\cdot k_2(\mathbf{x}, \mathbf{y})\) 是合法核函数。\(\blacksquare\)
4. 前向算法递推证明
由前向变量定义 \(a_t = p(y_1,\dots,y_t,s_t)\),对联合概率做条件分解:
由于观测 \(y_t\) 仅依赖当前状态 \(s_t\),\(p(y_1,\dots,y_t\,|\,s_t)=p(y_t\,|\,s_t)\,p(y_1,\dots,y_{t-1}\,|\,s_t)\),故
对 \(s_{t-1}\) 全概率展开:
再按 \(s_{t-1}\) 条件分解,并用一阶马尔可夫性 \(p(s_t\,|\,y_1,\dots,y_{t-1},s_{t-1})=p(s_t\,|\,s_{t-1})\)、以及给定 \(s_{t-1}\) 时历史观测与 \(s_t\) 条件独立 \(p(y_1,\dots,y_{t-1}\,|\,s_{t-1},s_t)=p(y_1,\dots,y_{t-1}\,|\,s_{t-1})\):
而 \(p(y_1,\dots,y_{t-1},s_{t-1})=a_{t-1}\),即得递推式
对末时刻所有状态求和即得观测序列的概率:
- 证明:
6. 最大似然估计与最小二乘的等价性
由噪声独立同分布的假设,\(m\) 个样本的似然函数为
由于 \(\log\) 是严格单调增函数,最大化 \(L(\boldsymbol{\theta})\) 等价于最大化对数似然 \(\ell(\boldsymbol{\theta})=\log L(\boldsymbol{\theta})\):
上式第一项 \(m\log\dfrac{1}{\sqrt{2\pi}\,\sigma}\) 与 \(\boldsymbol{\theta}\) 无关,是常数;第二项的系数 \(\dfrac{1}{\sigma^2}>0\) 也与 \(\boldsymbol{\theta}\) 无关。因此关于 \(\boldsymbol{\theta}\) 最大化 \(\ell(\boldsymbol{\theta})\),等价于最小化
即最小二乘代价函数。故在高斯噪声假设下,线性回归的最大似然估计与最小二乘估计等价。\(\blacksquare\)
7. 逆变换采样
8. 扩散模型
由加噪定义及重参数化技巧,每一步可写为
将上一步展开代入:
由于 \(\epsilon_{t-1},\epsilon_t\) 独立且均为 \(\mathcal{N}(0,I)\),两个零均值高斯之和仍为零均值高斯,其协方差为各方差相加:
故可合并为单一噪声 \(\bar\epsilon\sim\mathcal{N}(0,I)\):
依此递推(数学归纳法)一直回代到 \(x_0\),每次合并独立高斯噪声,可得 $\(x_t=\sqrt{\textstyle\prod_{s=1}^{t}\alpha_s}\;x_0+\sqrt{1-\textstyle\prod_{s=1}^{t}\alpha_s}\;\bar\epsilon=\sqrt{\bar\alpha_t}\,x_0+\sqrt{1-\bar\alpha_t}\,\bar\epsilon,\)$ 即
因 \(\beta_s\in(0,1)\),故 \(\alpha_s=1-\beta_s\in(0,1)\),从而 \(\bar\alpha_t=\prod_{s=1}^{t}\alpha_s\) 随 \(t\) 单调递减且当步数足够大时 \(\bar\alpha_t\to 0\)。此时上式的均值 \(\sqrt{\bar\alpha_t}\,x_0\to 0\)、协方差 \((1-\bar\alpha_t)I\to I\),于是
即正向过程最终把任意 \(x_0\) 抹成(近似)标准高斯分布。\(\blacksquare\)